COVID-19 Colombia Information Dashboard
Published:
MATLAB-based desktop application for real-time COVID-19 data analysis and visualization in Colombia

Published:
MATLAB-based desktop application for real-time COVID-19 data analysis and visualization in Colombia
Published:
Open-source implementation and benchmarking of A-LOAM, ISCLOAM, and LeGO-LOAM using KITTI dataset
Published:
NASA Honorable Mention - Climate trends visualization in Los Glaciares National Park, Argentina using Landsat 8/9 imagery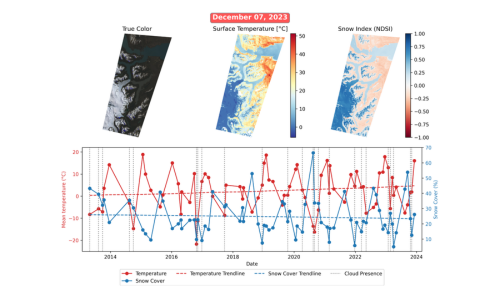
Published:
Open-source Python package for Ubidots platform management, published on PyPI
Published in 2021 IEEE 5th Colombian Conference on Automatic Control (CCAC), 2021
Implementation and comparison of A-LOAM, ISCLOAM, and LeGO-LOAM algorithms using the KITTI database for real-time SLAM applications.
Recommended citation: H. F. Murcia and C. F. Rubio, "A Comparison of LiDAR Odometry and Mapping Techniques," 2021 IEEE 5th Colombian Conference on Automatic Control (CCAC), Ibague, Colombia, 2021, pp. 192-197, doi: 10.1109/CCAC51819.2021.9633299.
Download Paper
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.